1. Short Description
The Data Collection and Edge Processing (DCEP) component is a software that was designed for the needs of the 7Shield project and is installed on the embedded PC of the UAV. More specifically, this component provides all communication capabilities with the control room as well as the handling of basic drone functions such as autonomous flights, camera synchronization and locating objects during the flight. In the image below we can see the embedded pc on which DCEP is installed.
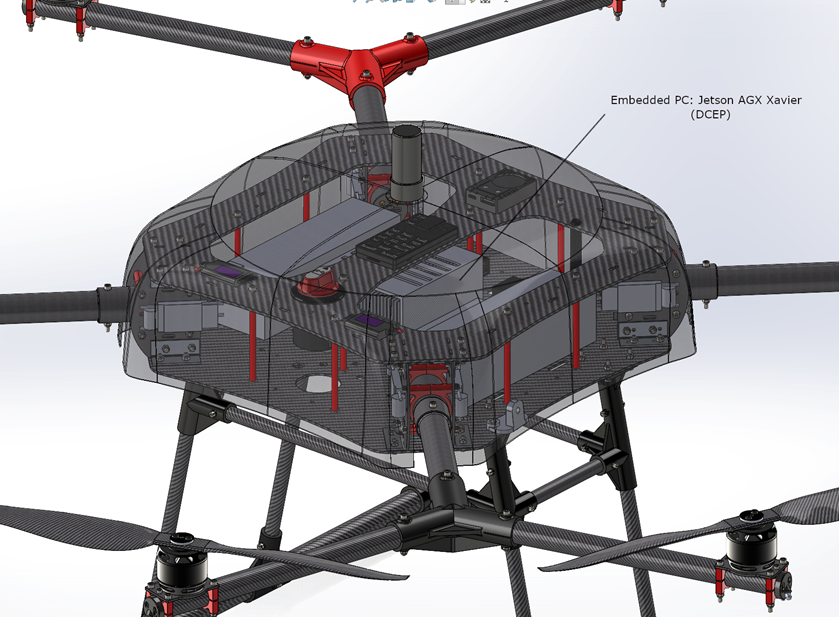
Figure 1- UAV
2. Main Purpose and Benefits
The main
objective of the DCEP component is to communicate with the control room and handle functions related to flight
scenarios. More specifically, this component is in continuous communication
with the control room and responds to commands related to the flight status of
the UAV. Furthermore, the basic function of DCEP is the execution of autonomous
flights based on each flight scenario. In the following images we can see the
communication of the UAV with the control center as well as the execution of an
autonomous flight.
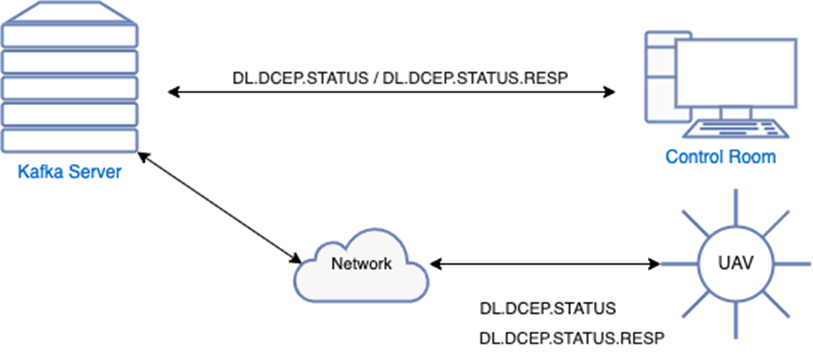
Figure 2 - The communication between the UAV and the control center

Figure 3 - The execution of an autonomous flight
scenario
3. Main Functions3.1. Communication with 7Shield
Control Room
The main function of DCEP is the immediate response to requests from
the control center for the state of the UAV (Takeoff, Landing).
3.2. Performing autonomous flights
Performing autonomous flights at specific points and at specific flight speed.
4. Integrations with other Tools of 7SHIELD
The data exchanged concerns UAV status data at the specific time as well as telemetry data (Gps position, Altitude, Attitude). Status data is exchanged between the UAV and the control
room via the Availability Correlator. Telemetry data is exchanged between the DCEP and the ODE to determine the point (Gps Location) at which the ODE detected a suspicious object.
5. Infrastructure Requirements
The
implementation of DCEP has been done following the specifications of the
embedded pc (Jetson). The execution of the DCEP implementation inside Jetson is
done as a unix service of the operating system it is running.